ニュース
![]() 2025.03.12
2025.03.12
【研究成果】ジャンプ動作中の「脚のバネ」を調節する筋肉と腱の連携メカニズム
2025年3月12日
東京大学
発表のポイント
- 連続ジャンプ(ホッピング)中に主に働く筋肉である腓腹筋(ふくらはぎの筋肉)を対象として、筋線維と腱組織を直列に結合した2つのバネとみなし、それらの相互作用を定量的に分析しました。
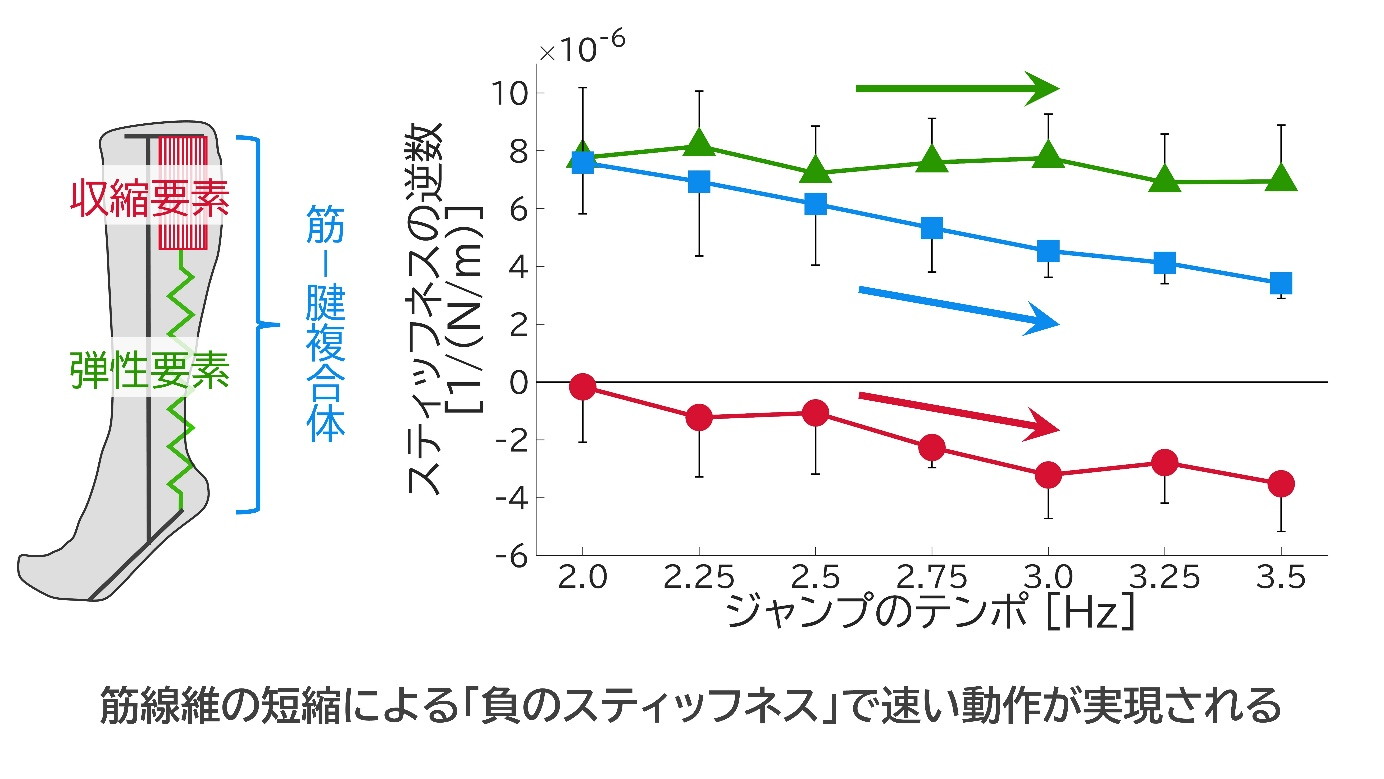
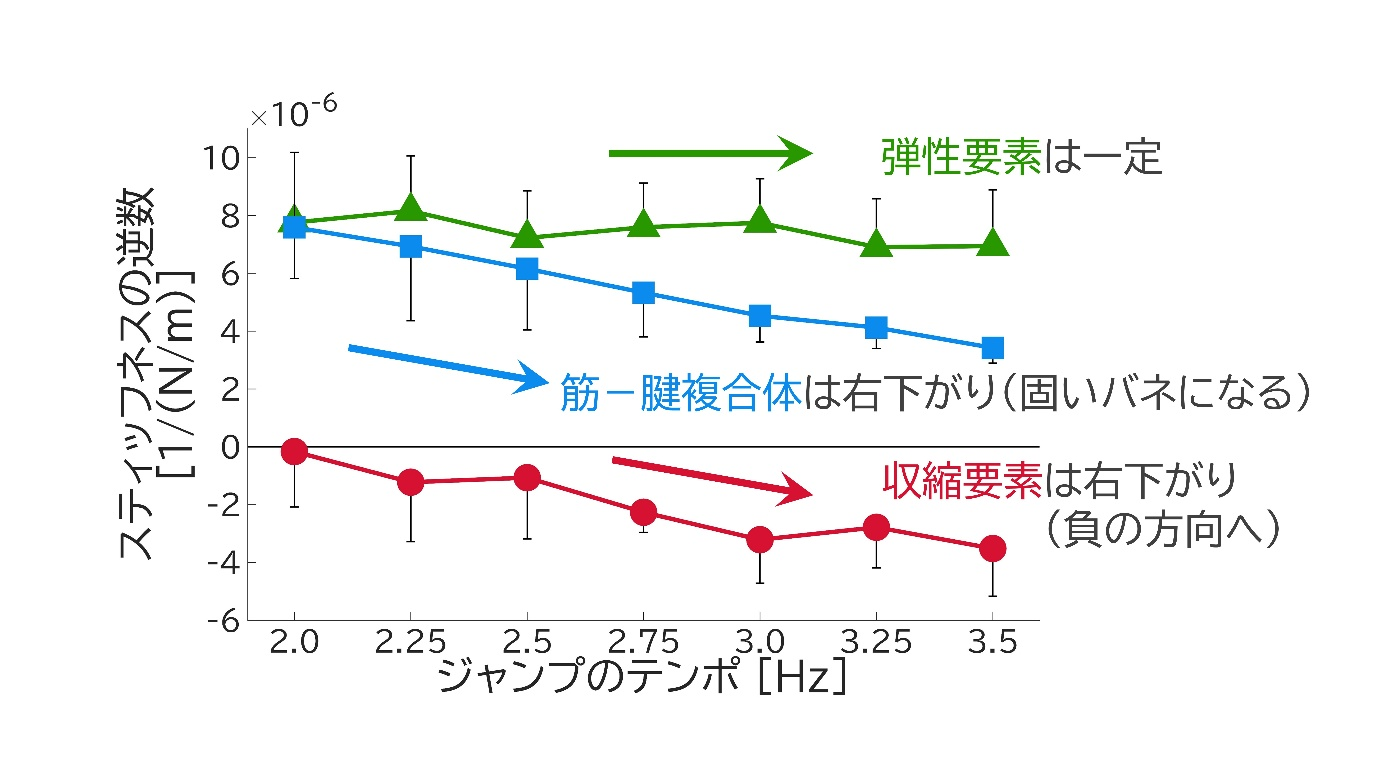
- 速い動作で要求される高い脚スティッフネス(脚がバネのように働く際の硬さ)は、筋線維の短縮による「負のスティッフネス」効果によって実現されることを明らかにし、様々な運動中の筋線維のダイナミクスが持つ機能的な意義の理解につながる新たな枠組みを提供しました。
- この知見は、工学への応用としては異なる力学的性質が要求される動作にも柔軟に対応できるロボットや義足の設計、スポーツにおいては、最適な歩幅や接地時間を実現する効率的なランニングフォームの指導法開発への応用などが期待されます。
概要
東京大学大学院総合文化研究科博士課程の栗山一輝さん、竹下大介准教授は、連続ジャンプ(ホッピング)中の腓腹筋(ふくらはぎの筋肉)の筋線維動態を超音波画像で可視化し、筋肉と腱が一体となって働く系である筋-腱複合体(注1)の力学的特性を分析しました。実験の結果、ジャンプのテンポが遅い時には筋線維がほとんど一定の長さを保つのに対し、テンポが速い時には筋線維が短縮するということが見出されました。筋肉と腱を「収縮要素」と「弾性要素」という2つのバネの組み合わせとしてモデル化した分析から、増加する負荷に逆らって筋線維が短縮することで脚全体のバネとしての硬さを高め、速いジャンプ動作の実現に貢献していることが明らかとなりました。この研究の枠組みにより、様々な条件下で巧みな運動を可能にする筋線維のダイナミクスの役割をより深く理解できるようになると期待されます。この研究成果は、2025年3月4日付で、Journal of Applied Physiologyに速報版が掲載されました。
発表内容
走行やジャンプなどの運動中に、ヒトの脚はバネのような振る舞いを見せることが知られています。脚全体がバネとして機能する際の硬さを「脚スティッフネス(注2)」と呼び、脚スティッフネスが高いほどより速い動作が可能になります。これまでの研究で、脚スティッフネスは動作の速さに応じて適切に調整されるということが示されてきました。特に、その場での連続ジャンプ(ホッピング)中の脚スティッフネスは、主に足関節のスティッフネスによって決まることがわかっています。そして、足関節のスティッフネスはふくらはぎの筋肉の活動パターンによって調節されていると考えられます。しかし、この筋肉内部の筋線維が脚スティッフネスを調節するメカニズムはこれまで明らかになっていませんでした。
本研究では、膝をできるだけ伸ばし、接地時間をできるだけ短くするように指示したホッピングを参加者に実施してもらい、超音波画像診断装置を用いて腓腹筋内側頭(注3)の筋線維の動きを可視化しました。同時に、三次元動作解析システムやフォースプレートを用いて、体の動きや発揮される力も測定しました(図1)。
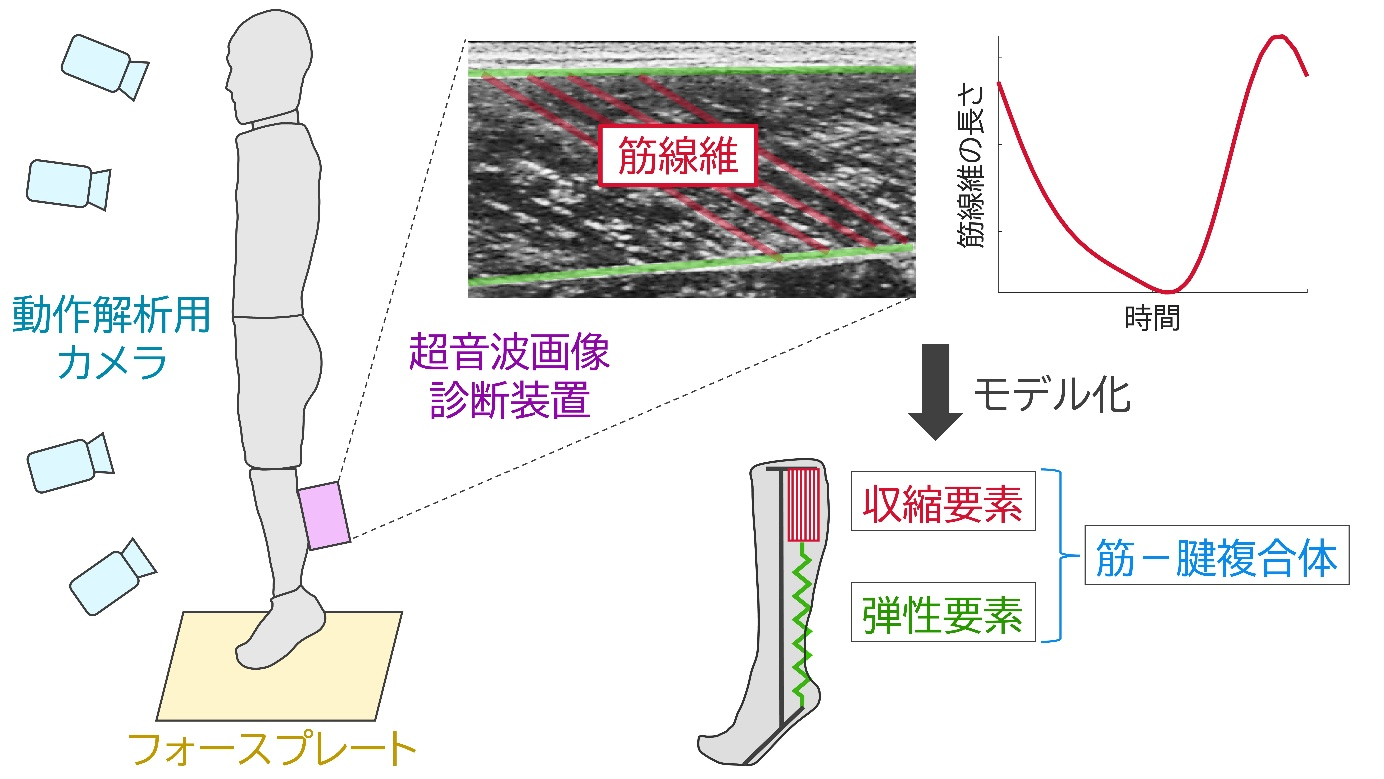
得られたデータを分析するため、筋-腱複合体を「収縮要素」(筋線維に相当)と「直列弾性要素」(腱組織に相当)という2つのバネが直列に繋がったモデルとして表現しました。このモデルを用いて、超音波画像から実測した筋線維の長さ変化データを分析し、ジャンプのテンポの変化に伴う筋-腱複合体の力学的特性を定量的に評価しました。
その結果、ジャンプのテンポが上がると筋線維は力が増加する局面で短縮するようになることが示されました。通常、バネは力を受けると伸びますが、筋線維がむしろ増加する力に逆らって縮み、通常のバネとは反対の動きをすることで「負のスティッフネス」という特性を示しました。この「負のスティッフネス」は、通常のバネの法則とは逆の振る舞いを意味し、力が増加する際に長さが減少するという特殊な性質です。これによって筋-腱複合体全体のスティッフネスが高まり、結果として脚スティッフネスも高くなることが示されました(図2)。これは、速いジャンプに必要な短い接地時間と高い脚スティッフネスを実現するためのメカニズムだと考えられます。
筋-腱複合体のスティッフネスを収縮要素と弾性要素の相互作用として定量的に理解する本研究のアプローチは、ホッピングだけでなく、走行やジャンプ、着地などの様々な動作における筋線維のダイナミクスがもつ機能的な意義を理解するための新たな枠組みを提供するものです。身体の運動を生み出す源である筋線維のダイナミクスの観点から運動パフォーマンスを理解する方法としてさらなる発展が期待されます。
また、本研究で明らかになった「筋線維と腱の連携メカニズム」の知見は、異なる力学的性質が求められる動作にも柔軟に適応できるロボットや義足の設計への応用が期待され、従来のロボットにはない、生体のような柔軟性と効率性を兼ね備えた動作機構の開発に貢献できる可能性があります。スポーツにおいては、個々の身体的特性に基づいた最適なランニングの歩幅や接地時間を身につける指導法の開発に応用でき、効率的なランニングフォームの実現に役立つと考えられます。
発表者・研究者等情報
東京大学 大学院総合文化研究科
竹下 大介 准教授
栗山 一輝 博士課程
論文情報
雑誌名:Journal of Applied Physiology
題名:Leg stiffness adjustment during hopping by dynamic interaction between the muscle and tendon of the medial gastrocnemius
著者名:Kazuki Kuriyama, *Daisuke Takeshita
DOI:10.1152/japplphysiol.00375.2024
研究助成
本研究は、科研費研究スタート支援(課題番号:19K24281)、基盤研究C(課題番号:20K11330, 23K10684)、JST次世代研究者挑戦的研究プログラム(JPMJSP2108)の支援により実施されました。
用語説明
(注1)筋-腱複合体:
筋線維と、それを骨と繋げる腱組織が一体となって働く系のこと。筋線維が収縮して力を発生させ、その力が腱を介して骨に伝わることで身体運動が生み出されている。
(注2)スティッフネス:
物体の変形のしにくさを表す物理量。フックの法則に基づいて、加えた力に対する変形量の比として算出される。脚スティッフネスは「脚全体の長さ変化に対する地面反力の大きさの比」などとして定義される。
(注3)腓腹筋内側頭:
ふくらはぎにある大きな筋肉(下腿三頭筋)の表面内側に位置する筋肉。主に足首を伸ばす運動に関与しており、歩行やジャンプなどの日常動作において地面を蹴ることで体を押し出す役割を担っている。

