教養学部報
第636号 ![]()
姿勢制御の構成原理の探求
柳原 大
種々のスポーツにおいて姿勢の調節が重要であることは言うまでもない。代表例として冬季オリンピックの競技から紹介しよう。スキージャンプにおける飛行姿勢では、安定でありながら、風の流れに応じた飛行姿勢の適切な調節が滑空時の揚力の生成に重要な役割を持ち、飛行距離に影響を及ぼす。モーグルでは、コブを滑っていく際に、上体及び頭部の安定性の維持のために、いわゆる吸収動作として、股関節および膝関節での協調した屈曲・伸展動作が重要な役割を果たしている。立位姿勢の調節においては、姿勢反射とも総称される反射が関与しているが、なかでも伸張反射は代表的である。これは、骨格筋の筋紡錘が筋の長さ変化を感知し、求心性ニューロンを介して運動ニューロンを活動させ、筋を収縮させる反射である。立位姿勢の際の伸張反射の動態について調べた研究は古くからある。Nashnerは被験者を水平な台上に静止させて、踝を中心として台を後方に回転させて足関節を背屈させ、下腿三頭筋に対して伸張刺激を加え、伸張反射を観察する実験を行った。台を後方に回転させる試行を反復していくと伸張反射の減弱が示された。下腿三頭筋の短縮が生じると傾斜した台上にて身体をより後方に傾けてしまうため、これは後方への転倒を防ぐための合理的な姿勢制御の適応と考えられる。このように僅か二つのニューロンで構成される伸張反射であってもステレオタイプというより状況依存的に修飾を受ける。近年Loramらは超音波画像による筋長の動態を観測し、身体を随意的に前方に傾ける時には下腿三頭筋が伸張せずに短縮していることを示し、立位姿勢の維持に関わる筋活動や伸張反射などのフィードバック系のゲインがフィードフォワード的に制御されていることを示唆している。
ところで、立位姿勢は、矢状面(体を左右に分ける面)上の二次元に限定すれば足関節まわりに回転する1リンク倒立振子としてモデル化できる。生体、即ち神経―筋―骨格系が持つ冗長多自由度系のダイナミクスの理解には、適切な仮説とそれを検証するための実験だけではなく、数理モデルを用いたシミュレーションが有用である。当研究室では、立位姿勢の調節に関わるフィードバック系、内部モデルを要するフィードフォワード系などを要素とした構成原理の解明に向けた取り組みについて、昨年二件のプレスリリースをしたので、それらについて簡単に紹介する。
ヒトと同様にラットにおいても、適切な報酬を与えてトレーニングすることで、後肢二足での直立姿勢を数分間維持することが可能になる。実験では、健常なラットと、小脳における内部モデルの生成に必要な延髄下オリーブ核ニューロンを薬理学的に障害したラットを用いた。下オリーブ核障害ラットでも健常ラットと同様に一定時間直立姿勢を維持できたものの、突然身体が振動しはじめ、転倒することも多々観察された。この際、ラットの重心の動きを解析すると、健常なラット、下オリーブ核障害ラットともに、約1秒の周期での振動がみられた。さらに下オリーブ核障害ラットでは、身体がゆっくりと大きく振動することが判明した。この原因を探るために、ラットの身体を足首から重心までの1リンク倒立振子とし、フィードバック制御を含んだモデルでシミュレーションして身体の動作を生成した。そして、実際のラットの重心の動きとシミュレーションとの差が小さくなるようにモデルの制御パラメータを探索すると、下オリーブ核障害ラットで見られた動きの変化は、傾きを予測して制御する機能が低下したためであるとわかった。
話をアルペンスキーに戻すと、コブや不整地を滑る際に、事前にコブの位置と大きさを視覚的に確認して予測することによって、下肢および体幹の筋緊張を予め準備し、コブ等における外乱によって身体がとばされないようにする。ヒトや動物は自身の身体の将来の安定性を維持するために予測的な姿勢制御を行う。小脳疾患患者ではこの予測的な姿勢制御が障害される。また当研究室における以前の研究においても、小脳プルキンエ細胞の変性が生じる脊髄小脳失調症3型のモデルマウスでは、予測的姿勢制御に関わる筋活動を適切に発現できないことが示されている。このような神経機構をより詳細に明らかにするために、後肢二足で直立姿勢を維持しているラットに、合図として光刺激を与え、一定時間(約0・9秒)後に台を後傾させて姿勢を乱す外乱を加え、それに対する適応・学習を調べた。初期の試行では床傾斜外乱により後肢の後方回転や、体幹上部および頭部の前方回転など大きな姿勢動揺を示したが、試行を繰り返すことでラットは姿勢動揺を低下させることができた。前述と同様に、ラットの身体構造を倒立振子、姿勢制御としてモデル予測制御によりモデル化し、実験データにシミュレーションが一致するようパラメータを探索したところ、ラットは現在時刻から約1秒未来までの時間区間における自分自身の運動を計算しながら、その運動が目標とする運動に一致するよう、足関節周りの筋力発揮パターンを最適化していることが示唆された。
我々が有する構造としての筋骨格系は、冗長多自由度系により巧緻な動き、美しい動き、安定した姿勢を実現することができる。その構造と神経制御機構を含めた構成原理の理解には、今後も、ある意味では"ウェット"な実験と"ドライ"な数理モデルに、深層学習技術を適宜組み込みながら読み解いていくことが重要になろう。
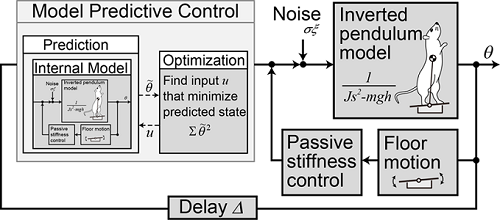
予測を伴うラットの姿勢制御のシステム
(生命環境科学/スポーツ・身体運動)
無断での転載、転用、複写を禁じます。

